
Naev Development Blarg (Page 19)
-
New tutorial
BY BTAXIS, ON MARCH 16TH, 2011
You’ve all seen it. The message asking you if you wanted to play a tutorial whenever you created a new pilot. Well, I’m pleased to say that message won’t be bothering you anymore, because the tutorial has a new face.

Main menu with tutorial button So, a new tutorial. What is different? Well, first of all the tutorial isn’t based in the regular game anymore. Where the old tutorial desperately tried to give you a quick crash course on how to play right at the start of the game, this tutorial is accessed right from the main menu, taking its time in a special training environment, teaching the basic concepts without worrying about the player flying off somewhere because, well, he can’t. So, hopefully, the new tutorial will make the learning process smoother for new players.
Another thing that is different is that the new tutorial is split up into several distinct modules, each module focusing on a limited selection of concepts and ignoring all the rest. This is good, because it means that our fledgling, ignorant player-in-training can revisit specific parts of the tutorial without having to sit through the whole thing again.
At present, six tutorial modules are coded up. These are: Basic operation, Interstellar Flight, Communications, Basic Combat, The planetary screen, and Missions and events. A further two, Advanced combat and Trade, will eventually be added. I say eventually, because both combat and trade are parts of the game that are in for a serious overhaul. Writing tutorials about them now would be pointless.
Most of you will already know how to play the game, so a new tutorial won’t help you much, but hopefully this step has made Naev that much more accessible to new players.
-
Merge into Master
BY BOBBENS, ON MARCH 12TH, 2011
As a good sign of what’s going on, all changes have been merged into master and development is now going to be done there. Some stats on the change:
naev: Edgar Simo master * rc7d316d / (9 files in 3 dirs): Merge branch 'balance' of git://github.com/Deiz/naev into tutorial (+1161 more commits...) - http://bit.ly/fmcrdB[bobbens@ghanima (~/usr/prj/naev)] $ git diff origin | wc -l 133349As you can see it’s a pretty big change. I’d consider it a new game. Anyway, on the 0.5.0 beta we’re waiting on finishing the new tutorial and then we’ll do some quick check ups and code analysis before the release. This won’t be the official release, just a beta as it’s still buggy and such. However it does give a change to get some mass testing done to get a nice polished 0.5.0 release. So after over 1000 commits and 100k line diff we are finally nearing the awaited 0.5.0 release, albeit with like a 3 month delay of the original goals, however this release is so ambitious I believe it’s totally worth it.
-
Manual Zoom and Dizzyness
BY BOBBENS, ON MARCH 7TH, 2011
It has come to my attention that numerous people become dizzy while playing Naev. As it is to my interest that no physical discomfort happen while playing Naev I’ve dealt with probably the first cause which is the zoom. While the zoom is nice to have automatic (and you can tweak it’s behaviour), it seems like it can make people dizzy. So Naev now has an option to enable manual zoom. It is controlled by mouse wheel, however I’ll probably add key bindings in the near future.
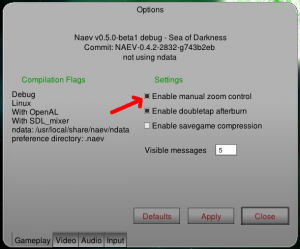
Location of the checkbox to enable manual zoom. This is a start. If anybody experiences dizziness still with Naev 0.5.0 I’d be very interested in feedback and investigation into what exactly triggers it to try to solve the issue.
-
Wikinaev
BY BOBBENS, ON JANUARY 21ST, 2011
As part of our move to become more independent from Google’s services, which should allow us more flexibility and comfort, we have decided to host our own wiki. This wiki will allow us to organize proposals, todo and overall design considerations by centralizing them. This does not make either the forums or the mailing list obsolete, but complements them. It’s not fully fleshed out yet, but it is already far superior to the old one. If you are interested in Naev and would like to contribute to the wiki, feel free.
One decision we have taken on the wiki is that we do not want every planet to have it’s own article. The wiki should focus on general information for both developers and players, without recording individual details. So, while the Empire faction gets it’s own page, the planet Em 5 does not. As with all wikis, we ask that you please do not add stuff you would like to see in game directly without getting the approval of a devteam member. However, you are completely free to write a proposal and submit that for review. You are all welcome to use the Naev wiki, let the editing begin!
-
Naev Etymology
BY BOBBENS, ON JANUARY 14TH, 2011
Today we’ll talk about the name of this game: it’s history, pronunciation and how to write it. First off a bit of history, as you probably do know, NAEV originally stood for “Neutron Accelerated Extreme Velocity” although “Not Another Escape Velocity” was also widely accepted. The original idea was to sort of create an improved clone of the original Escape Velocity game. However with the 0.5.0 release we will transcend that. Naev is no longer a clone and therefore no longer an acronym, it is now a proper noun. So from now on no more NAEV, only Naev! You may notice I have been changing that, this unification of criteria will make it easier to handle and no longer cause confusion.
Now onto pronunciation, how is it pronounced? In case someday we hold a Naev meet or the likes we should all know how to pronounce it so we don’t make a mess and fools of ourselves (we probably will anyway). The proper way to pronounce Naev is /nɑ.ɛv/ if I got right my symbols (would need confirmation). I know most of you pronounce it more like knave, but trust me, that is wrong.
For those who still have doubts on how to pronounce: Naev Pronunciation
Naev /nɑ.ɛv/ An open source action/RPG space video game.
NOTE Unfortunately it looks like we will have to rely on phonetic spelling due to a missing sound clip.